
この記事では実際にEzRobot(イージーロボット)で業務を自動化させるためにどのような機能があるのかを紹介していきます。
今回は条件分岐編。条件分岐を上手く使用しシナリオ作成を行えば、ロボットが状況に応じた処理をしてくれることでしょう。
これまでの機能紹介に引続き、業務の自動化を行う上で頻繁に使用される機能となります。条件分岐について理解して、シナリオ作成に役立てていきましょう。
RPAにおける条件分岐とは
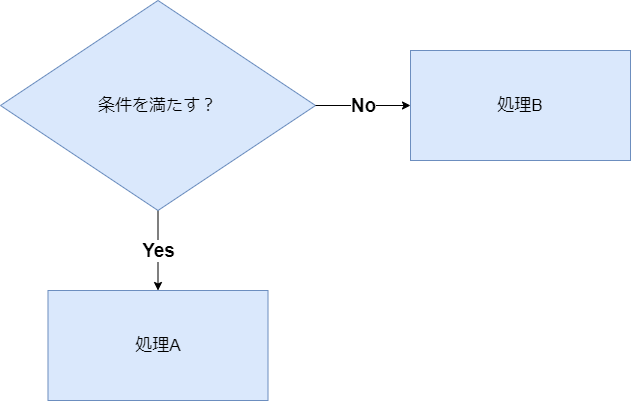
RPAにおける条件分岐とは、条件を満たすかどうかでロボットに処理させる作業を変える命令のことです。
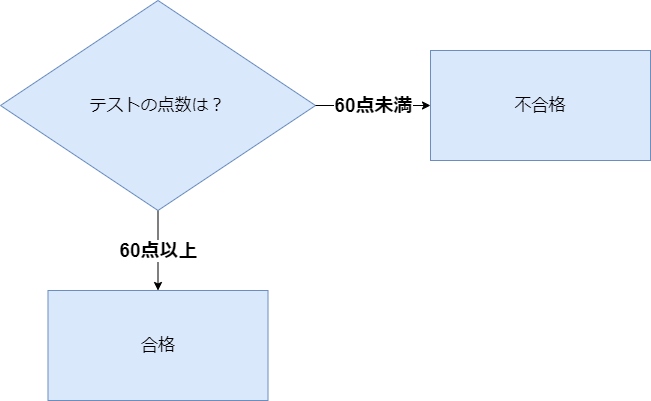
簡単な例を挙げると、「テストの点数が60点以上ならば合格、60点未満であれば不合格を判定するロボット」とかですね。
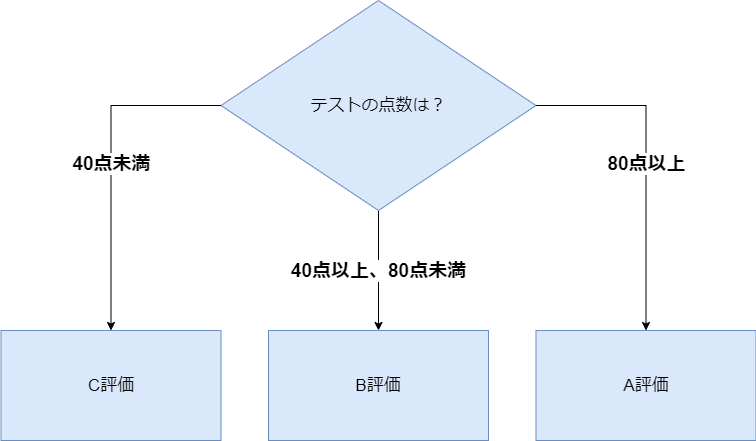
上の例では条件分岐の数は2つですが、分岐の数は2つとは限りません。例えば、「点数が40点未満はC、40点以上80点未満の場合はB、80点以上はA」の様に評価をつける場合は分岐の数は3つになります。
条件による処理内容の変更は多くあると思います。条件分岐を上手く使いこなせば、柔軟な対応ができるロボットを作成できるようになることでしょう。
では、実際にロボットを作成しながら、条件分岐に慣れていきましょう。
条件分岐を使用したロボットを作成しよう!!
身近なテーマを例に挙げ、シナリオを作成しながら条件分岐を使えるように練習していきましょう。
生徒の点数に応じて以下のフォーマットに評価をつけるロボットのシナリオを作成していきます。
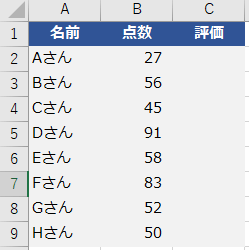
条件は以下の3つです。
点数が40点未満 ⇒ C
40点以上、80点未満の場合 ⇒ B
80点以上 ⇒ A
なお、完成すれば以下動画の様な動作をするロボットが作成されます。
使用するフォーマットは以下からダウンロードが可能です。
1.ロボットに作業させることを手順としてまとめる
ロボットにやらせることを手順としてまとめてみましょう。
今回は以下の様な手順で進めていきます。
①:成績表ファイルを開く
②:点数を取得する
③:点数に応じて評価する
④:評価点を出力する
⑤:②~④をHさんまで繰り返す
2.実際にロボットを作成してみよう
まとめた手順をもとにロボットを作成していきます。
2-1.評価表ファイルを開く
最初に評価表ファイルを開きましょう。
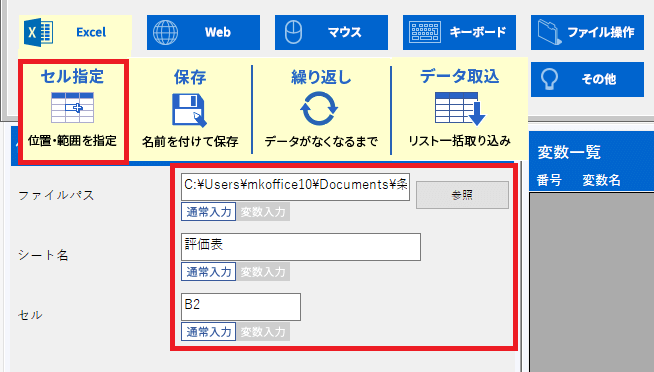
機能ボタンの「Excel」から「セル指定」を選択後、作業対象内の記入欄を埋めていきます。
ファイルパスは参照ボタンをクリックして、エクセルの評価表ファイルを選択しましょう。シート名は「評価表」、セルは点数列でデータ開始行の「B2」を記入します。
2-2.点数を取得する
点数を格納する変数と評価点を格納する変数を各々用意しましょう。変数についてはコチラで説明していますので、もし分からなければ参考にしてみてください。
今回は「点数」という名前の変数を用意しました。同様に今回は評価点の変数も用意しています。
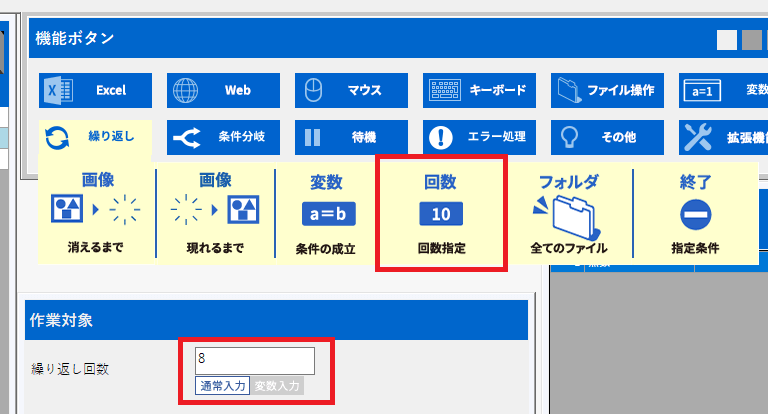
Hさんまで評価するために繰り返し処理を使用していきます。AさんからHさんまでの繰り返し回数は8回となります。
機能ボタンの「繰り返し」から「回数指定」を選択、繰り返し回数を「8」にします。
※繰り返し処理についてはコチラで説明していますので、良かったら参考にしてください。
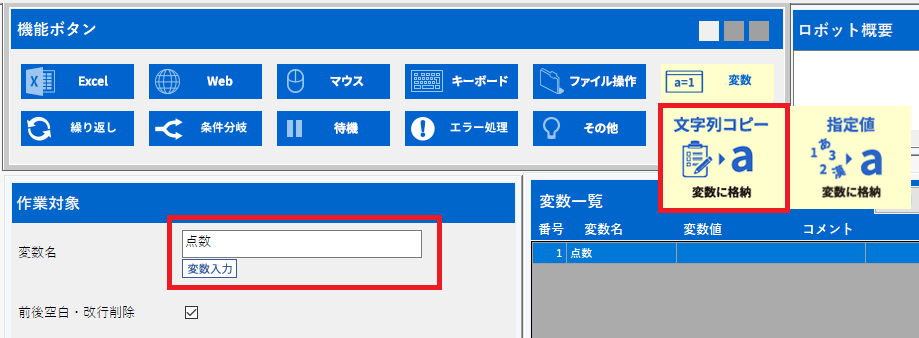
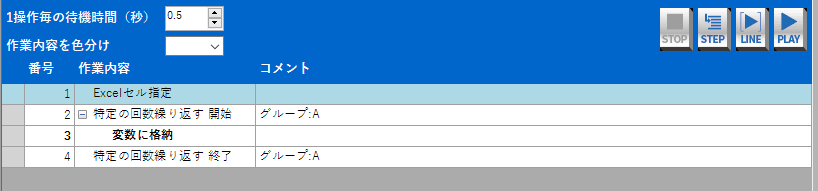
次に点数を取得し変数に格納したいので、機能ボタンの「変数」から「変数に格納」を選択し、変数名を記入しましょう。
これで、点数を取得できるようになりました。以下画像がここまでのロボットのシナリオです。
2-3.点数に応じて評価する
いよいよ条件分岐の出番です。
取得した点数をもとに評価を付けていきます。
機能ボタンの「条件分岐」から「変数指定による分岐」を選択します。
今回は3つに分岐させたいので「3」と入力しましょう。
次に条件を指定していきます。
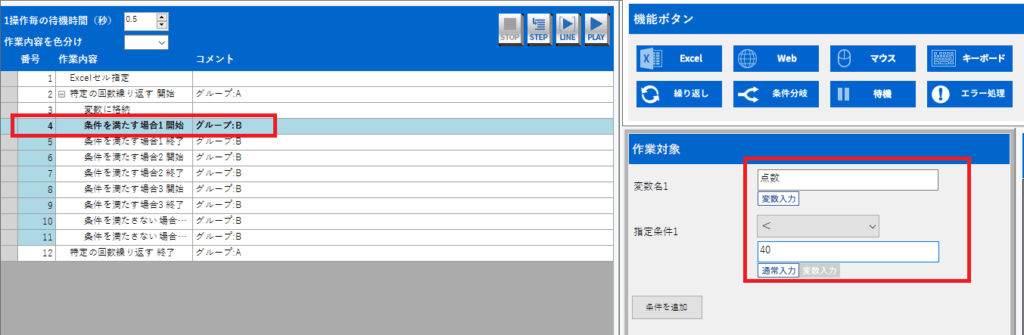
最初に設定する条件は点数が40点未満の場合です。
シナリオ一覧から「条件を満たす場合1 開始」をクリックします。その後、作業対象の入力欄を埋めていきましょう。今回は変数名1に「点数」、指定条件は「40点未満」ですので、演算子は「<」、値は「40」を入力します。
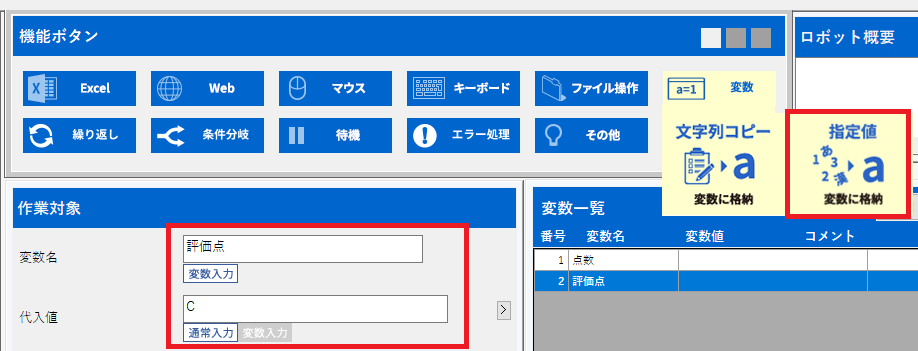
次に条件を満たした場合、評価点の変数に「C」を格納させるシナリオを追加します。
機能ボタンの「変数」から「指定値」を選択し、変数名と代入値を記入しましょう。変数は「評価点」、指定値は「C」となります。
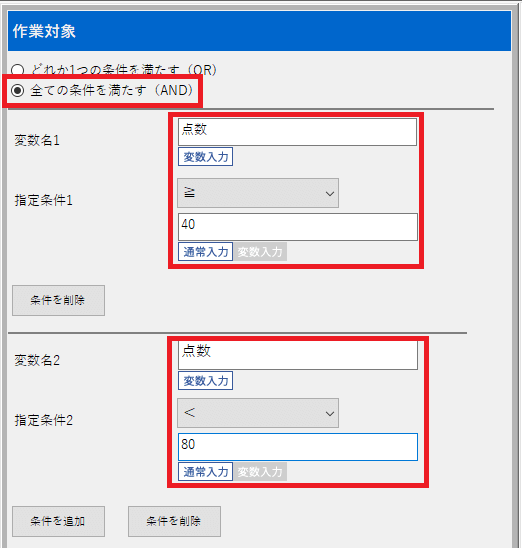
この作業を40点以上、80点未満の場合と80点以上の場合もやっていきます。
ただ、40点以上、80点未満の条件の指定方法に注意しましょう。40点以上かつ80点未満となるため、作業対象の入力欄は以下画像の様になります。
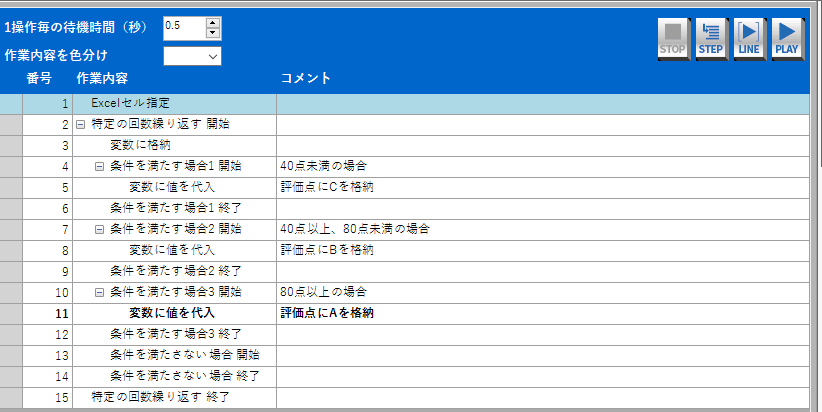
ここまでのシナリオは以下の様になります。今回、条件を満たさない場合は特に何も処理をさせなくてよいでしょう。
2-4.評価点を出力する
最後に評価点を出力させます。
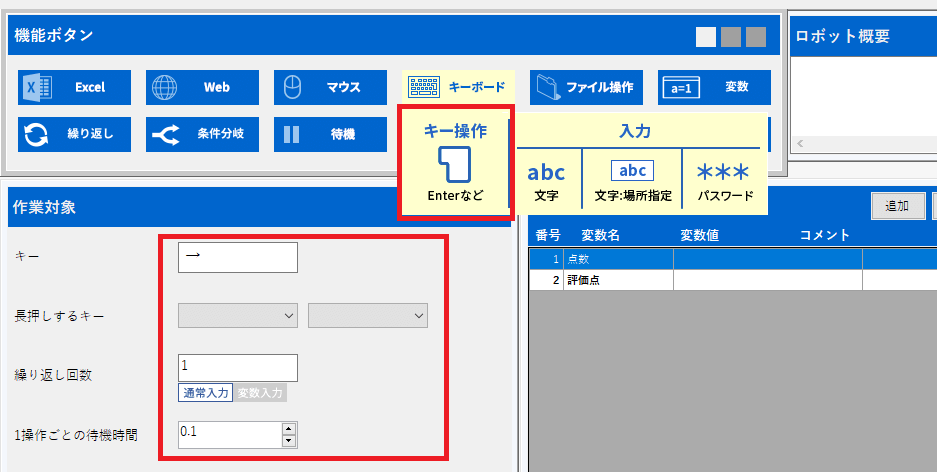
現時点では点数列(B列)のセルがアクティブになっているため、同じ行の評価列(C列)のセルを選択させます。
機能ボタンの「キーボード」から「キー操作」を選択します。次に作業対象内の「キー」の入力タブを選択し、「→」の方向キーを押しましょう。
次に値を出力させます。
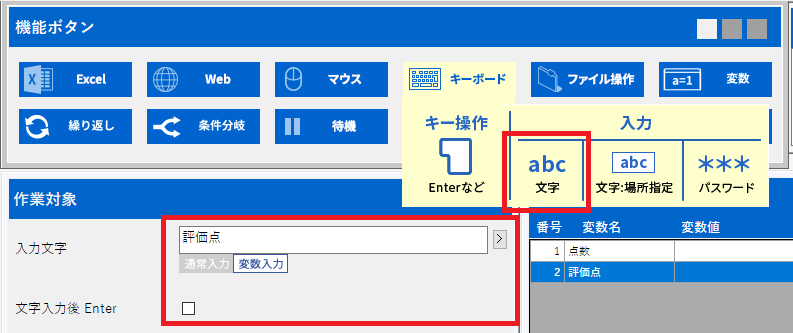
機能ボタンの「キーボード」から「文字」を選択します。次に作業対象内の「入力文字」に評価点が格納してある変数名を入力します。下のチェックマークは外しておきましょう。
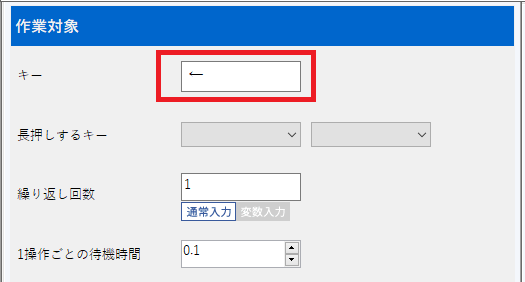
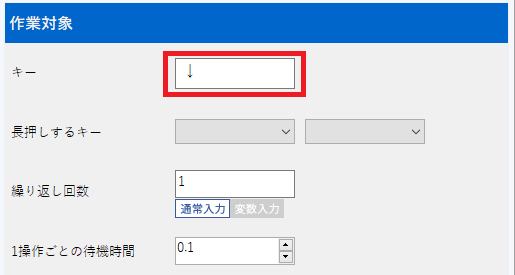
最後に、次の点数があるセルを選択してあげれば完了です。つまりアクティブセルをC列からB列へ移動させ、次の行を選択させればよいのでキー操作は「←」、「↓」の順番になります。(逆でもOKです。)
あとは、「2-2.点数を取得する」処理へ戻り、Hさんまで繰り返してくれることでしょう。
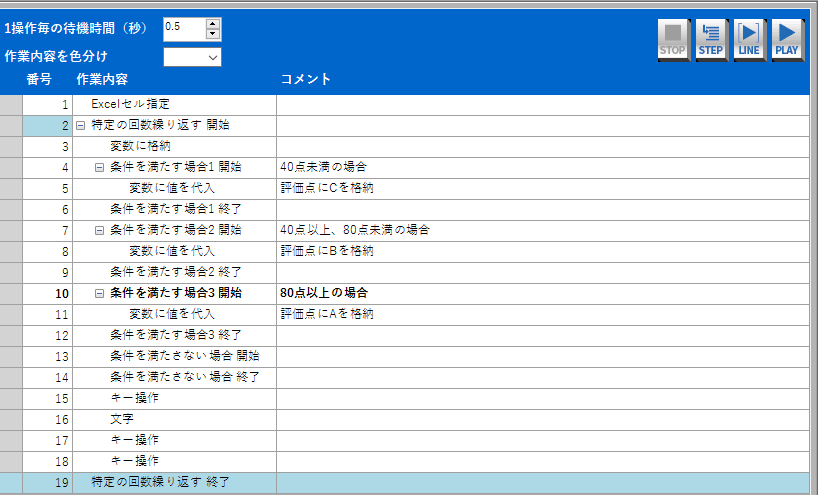
完成したロボットのシナリオ内容は以下になります。
お疲れ様でした!!
さいごに
いかがだったでしょうか。この記事を読んで、少しでも条件分岐の処理が使えるようになって頂ければ幸いです。
条件分岐を駆使して、定形的な事務作業なども含めて様々な作業をEzRobot(イージーロボット)にお任せしてしまいましょう!!
さて、今後はEzRobotの内の各コマンドについて使用方法をご紹介していこうかと思います。